该电机驱动器,适合在工业、家电、电动工具、电动自行车等行业大批量应用。

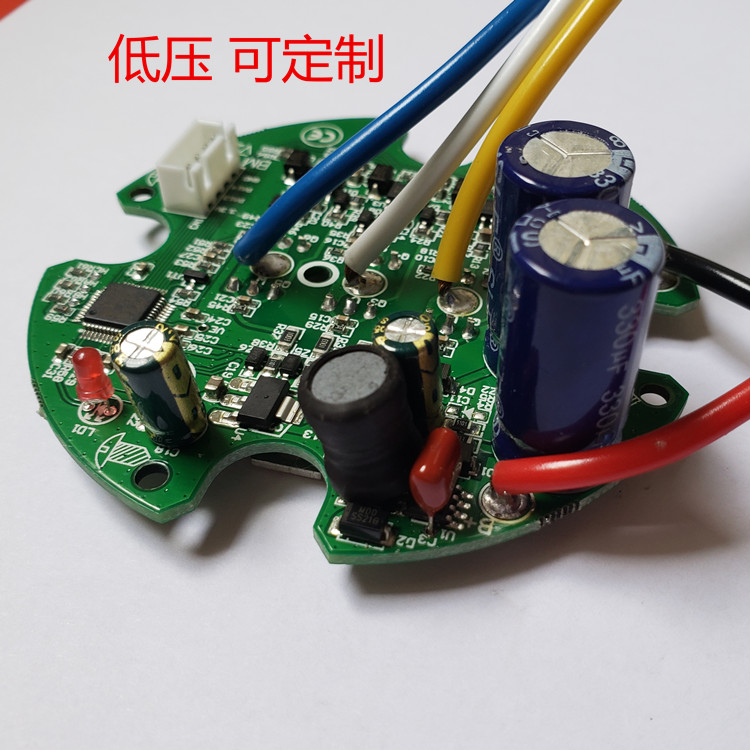
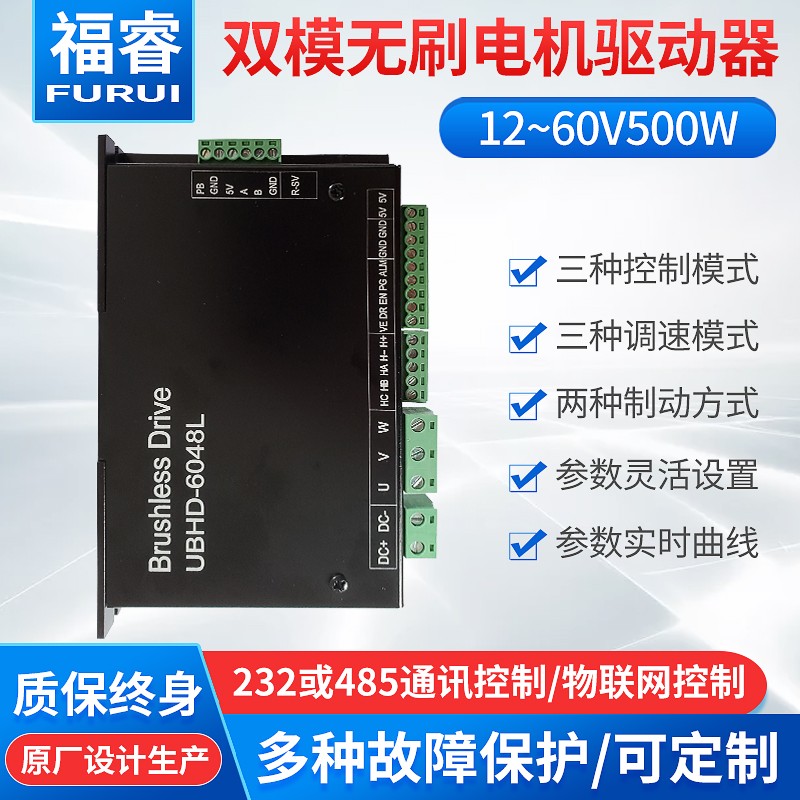
产品实拍图:

支持有霍尔或无霍尔方式,支持DR方向不断切换,支持EN启停,支持内外部调速,支持开环、速度闭环、双闭环控制模式、支持232或485通讯控制,可提供通讯协议、方便多台同步控制;配监控系统,可灵活设置各种电机参数、控制参数、控制命令等,实时显示电压电流、显示电压、电流、速度实时曲线;多种故障保护机制、故障输出、速度输出等功能;采用原装进口全新元件、四层沉金工艺、适用于直流无刷电机控制各种应用场合,提供技术服务,长期供应,量大优惠。
技术参数:
名称:无刷直流电机驱动器
UBHD-6048L无刷直流电机驱动器是由我司新推出的针对于大功率电机拖动领域的高科技产品。本产品采用性价比极高的高性能微控器(MCU)解决方案,具有高度的抗干扰性及快速的响应性,从控制性能上与传统直流电机相比具有免维护、长寿命等优势,广泛应用于针织设备、医疗设备、食品机械、电动工具、园林机械等一系列电气自动化控制领域。
本品驱动器适合驱动电源电压在直流60V以内、电机功率在500W以内、电流小于15以内的任何一款低压三相无刷直流电机(支持霍尔或无霍尔,可通过监控系统配置)。具有内部电位器调速或外部模拟电压调速功能,且配有上位机监控系统,具有方向选择、速度输入、额定转速、停车模式、极对数、软启动时间等参数的设置功能,还具备大转矩启动、快速启动、刹车、正反转切换等等功能。支持485一对多同步通讯控制。
一、 产品特点
二、 电气特性
输入电源: | DC 12V~60V直流电源供电,容量:根据电机功率选择。 |
输出电流: | 额定13A,瞬时30A(≤3s)。 |
驱动方式: | PWM方波驱动输出。 |
绝缘电阻: | 常温常压下>500MΩ。 |
绝缘强度: | 常温常压下500V/分钟。 |
重 量 | 约500克。 |
三、 环境要求
使用场合 | 避免粉尘、油雾及腐蚀性气体。 |
使用温度 | -20C~+85C。 |
环境湿度 | <80%RH,不凝露,不结霜。 |
震 动 | 不超过5.7m/s2。。 |
保 存 | -20oC~+125oC,避免灰尘, |
四、 功能使用
直流电源输入,12~48VDC,通常采用线性电源供电,用户须注意整流滤波后电源纹波电压,不可超过50VDC,以免损坏驱动器,电源的额定输出电流应大于驱动器输出电流的150%。当采用开关电源供电时,应注意其标称的额定输出电流,尽量选购与电机相电流匹配的开关电源(120%)。
2.U,V,W:电机三相线
直流无刷电机三根相线。使用霍尔款时,务必与霍尔配对正确接线,并且一定要拧紧螺丝。如果要长期工作在大电流状态(10A),建议采用直接焊线式连接(即电源输入及三根相线,采用粗导线直接焊在端子座焊点上)。
3.HA,HB,HC:霍尔(Hall)信号线
无霍尔模式运行时,此信号可不接入。霍尔模式运行时,必须与相项配对正确接线。
4.H+、H-:霍尔/信号电源
霍尔(Hall)供电电源;不用霍尔时,可以不用。
5.VE:外部调速信号输入
外接调速信号输入(标准出货为:0 ~ 5V),使用内部调速时悬空。
支持外接10K电位器或模拟电压调速。当外接电位器时,Ve对应电位器中间脚,5V、GND对应连接电位器的两边脚。
当外接模拟电压(0~5V)时,GND为参考地,Ve为模拟电压输入信号。如果需要使用外部0~10V作为调速信号,需在订货前说明。
温馨提示:若调速方式需要灵活变动,必须使用随机配送的通讯电缆连接电脑,并安装监控系统软件,在电脑上或使用面板上设置。
6.DR:电机运转方向控制
正反转方向控制端口。悬空或高电平时为正转,低电平反转。此信号需有5mA以上驱动吸收能力。
外部接线如下图所示。(请参考说明书)
当K合上(DR为低电平),电机方向切换为反转。当K断开(DR为高电平),电机方向为正转。
出厂默认为“端口控制”状态。可在显示面板或电脑上(上位机监控系统中方向选择参数)配置为“端口控制”或“正转”或“反转”。
7. EN
用户可通过控制驱动器EN端子来控制电机的起动或停止(或刹车)。此信号需有5mA以上驱动吸收能力。
外部接线如下图所示。
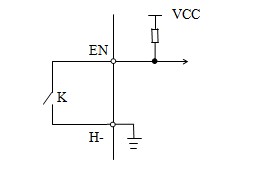
当K合上(EN为低电平),电机启动运行。当K断开(EN为高电平),电机或自由停车或刹车,即停止运行。
出厂默认为自由停车。可通过显示面板或电脑上(上位机监控系统中方向选择参数)配置为“自由停车”或“快速刹车”。
当端子为低电平时,电机模块使能(EN),当调速信号有效时电机转动。此时,面板或上位机通讯无法改变EN信号的有效性。即EN信号有效时(0),不响应上位机的启停命令。
温馨提示:当端子上(EN)为高电平(即悬空)时,可以使用面板或上位机通讯的启/停控制。如果不使用面板或上位机控制时,EN与GND或H-短接,此时,可通过调速电位器启停电机。
8.PG:电机转速反馈输出
速度反馈信号。采用OC门方式,不用时悬空。此信号与电机转速成正比,PG频率与霍尔换相频率相同。
电机转速=60×PG信号频率/(电机极对数*3);
例如:用户选用4对级电机时,当PG输出信号频率为600HZ时,电机转速=60×600/12=3000转/分。
9.ALM:报警、故障信号输出
报警、故障信号输出。ALM信号输出是三极管开漏输出,不用时可悬空。当驱动器发生过流、过压等异常时,在ALM端输出低电平。其吸收电流应小于50MA。报警输出电路有如下几种。(请参考说明书)
当驱动器产生过流、过压、堵转、电机失控等故障时,会自动进入保护状态,停止电机运转,并向外输出一个报警信号ALM,同时,驱动器内部红色指示灯亮起,限度的保护驱动器和电机的安全。
发生此报警时,请立即切断电源,检查配线是否错误以及电源电压是否在规定的范围之内。当选择大惯量电机时,电源电压不宜选用太高,以防频繁启停造成驱动器过压报警。
10.LED:指示灯
工作状态指示灯,正常时长亮(RUN);当发生故障时闪烁(Err)。
11. A\B
此接口为RS485通讯接口,可连接电脑,运行上位机监控系统,以配置参数等功能。也可以通过此接口实现上位机(其它MCU)的控制。如有需要,请联系厂家,索要通讯协议。
12.R-SV:内部调速
内部电位器调速,顺时针旋转,速度0-100 %。速度调为0时,电机停止运行。可通过PC端软件设定使用。
出厂默认为内部电位器调速功能。
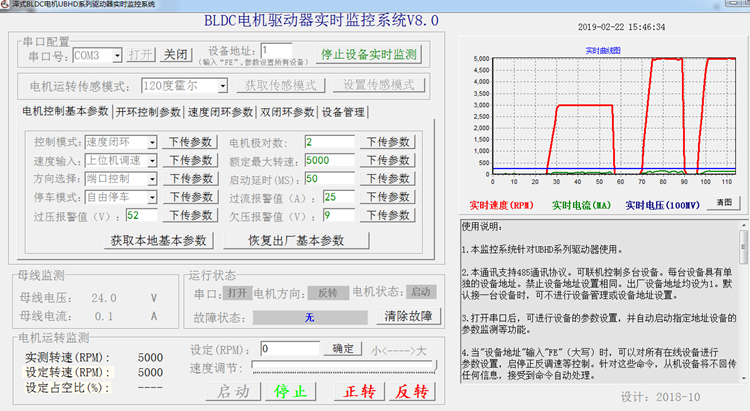
五、 PC端的参数配置及控制软件说明
用户可配合监控系统修改参数或监测运行状态。参数设置成功后,可以不用监控系统,独立使用驱动器。 监控系统界面如下图所示。
配监控系统,可灵活设置各种电机参数、控制参数、控制命令等,实时显示电压电流、显示电压、电流、速度实时曲线;

通过监控系统,可获取驱动器当前的参数设置状态,也可对各种参数进行设置。如:
方向选择:包括正转、反转和端口控制。默认为端口控制。
速度输入:包括内部调速、外部调速、上位机调速。默认为内部调速。
停车模式:包括自由停车和快速刹车。默认为自由停车。
极对数:电机极对数参数。必须与电机保持一致。
额定转速:电机运行的额定转速。也为驱动器调速的转速。
启动时间:电机从0速到设定转速的时间。MS为单位。
过流报警值:A为单位,出厂设为15A。
过压报警值:V为单位,出厂设为52V。
欠压报警值:V为单位,出厂设为9V。
启动延时:指速度与EN使能信号同时有效时,延时启动的时间设置。
另外,有户可以对电机极对数,额定转速等参数进行设置,还可设置软启动的启动时间。每次设置,都需要“下传参数”。
更多介绍可在监控系统中使用说明中查看。
驱动器有良好的保护功能,当发生各种故障时,故障信号可能过上位机显示出来。也可以通过驱动器指示灯显示出来。
驱动器内部特点:

驱动器可与配套的速度显示板连接,方便显示实时速度值。
速度显示板:

带显示板时的接线参考图(下图仅供参考,实际接入时端口接入方法相同):